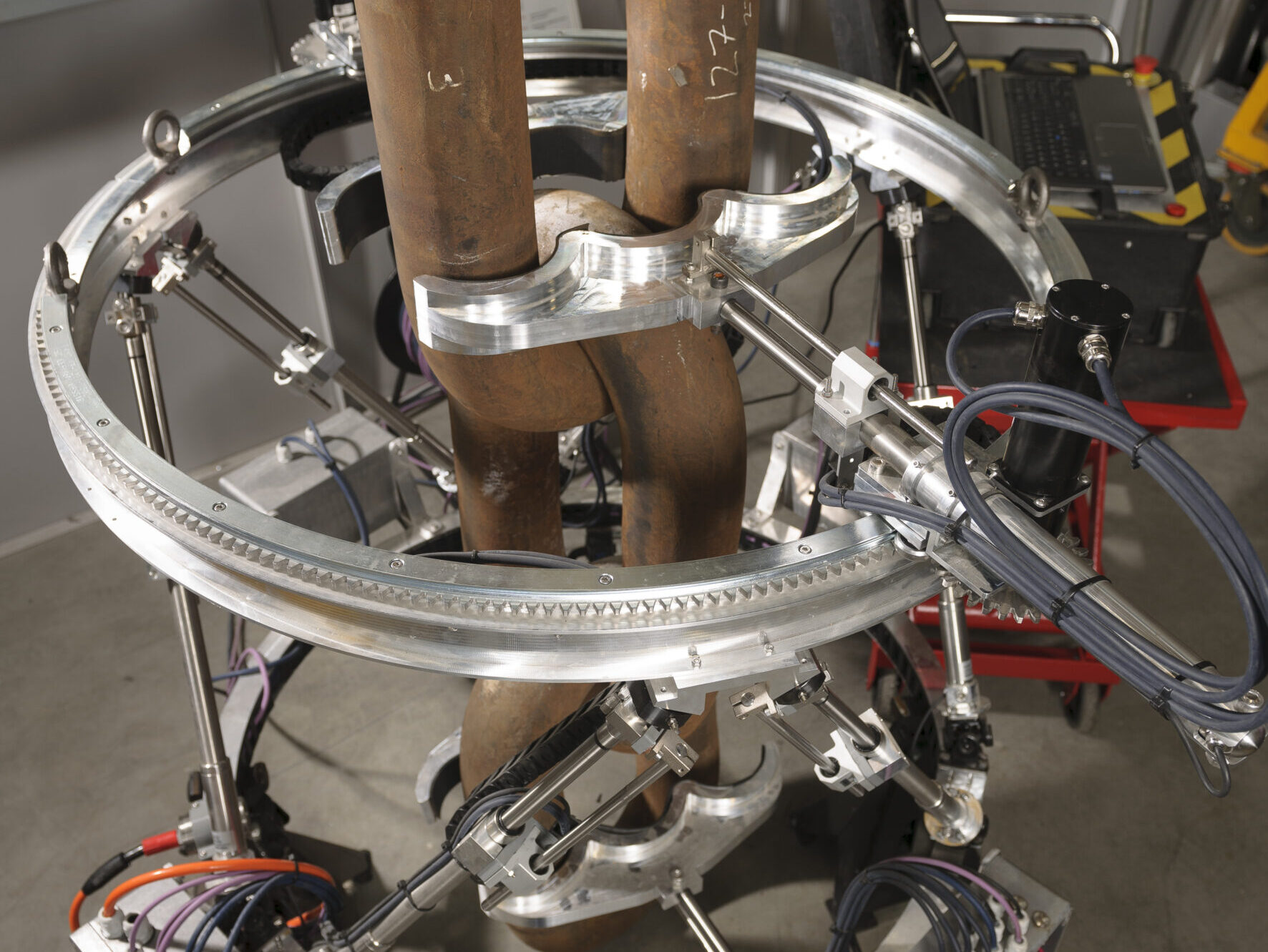
To prevent large FPSO vessels from breaking away and drifting. This robotic inspection system was developed to detect corrosion, fatigue cracks, and weld integrity of mooring chains. The intention was to develop a robot that could traverse and crawl along the mooring chain. A Stewart platform design was selected to give the robot the ability to roll, pitch, and yaw while grabbing the next chain link.
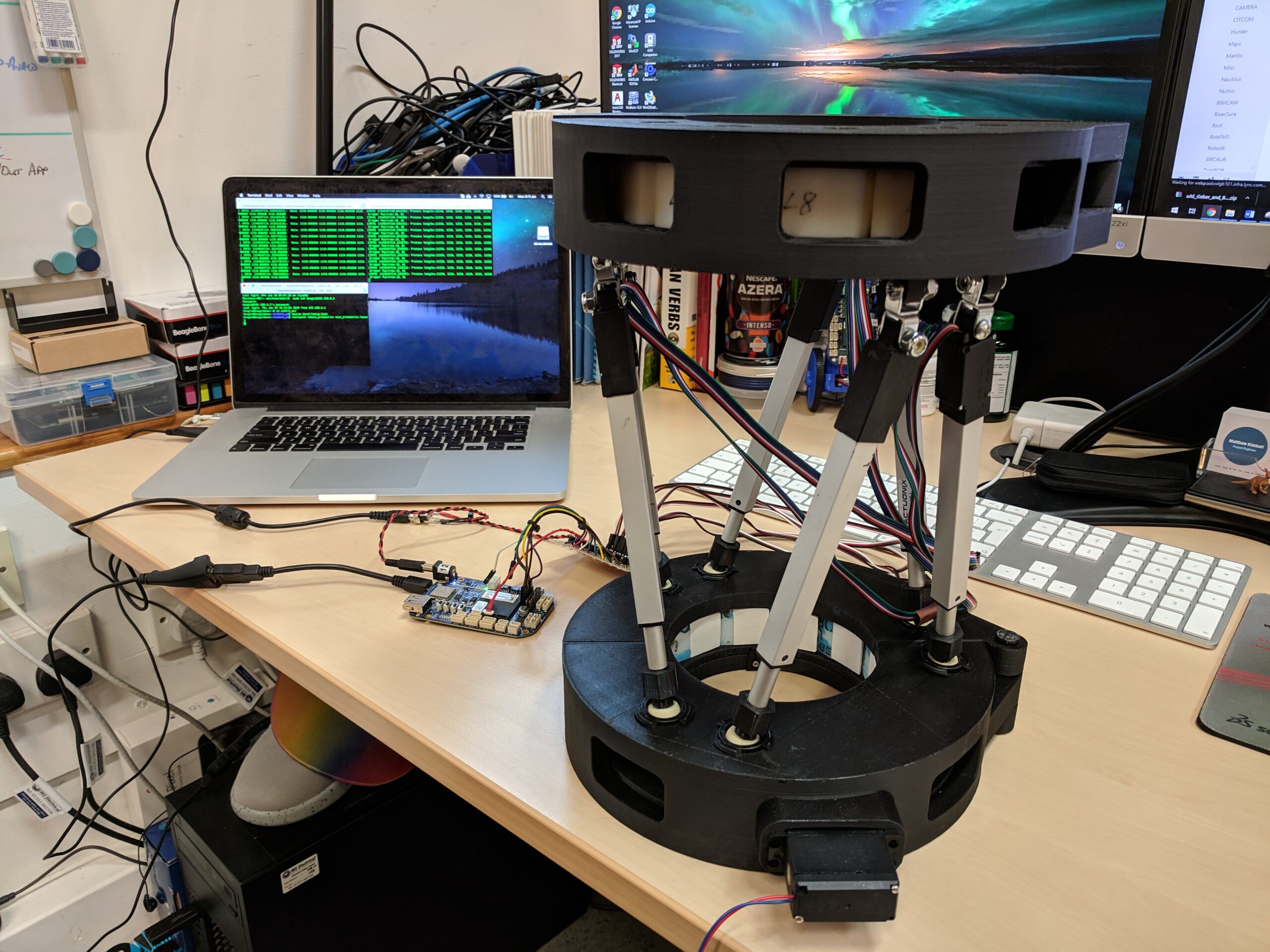
Flexible riser pipes are used to transport oil from the seabed, to prevent a catastrophic failure, these pipes need to be inspected on a regular basis. We developed this prototype as a means of checking the feasibility of using a Stewart platform to traverse a pipe and perform detailed inspections.